Hand-bots
The hand-bot is a fully new concept of robot specilized in both climbing
vertical surfaces and manipulating objects. The hand-bot is not able to move
on the ground (rely for this on the foot-bots and on self-assembling features)
and has a very weak perception of distant environment (rely for this on the
eye-bots)
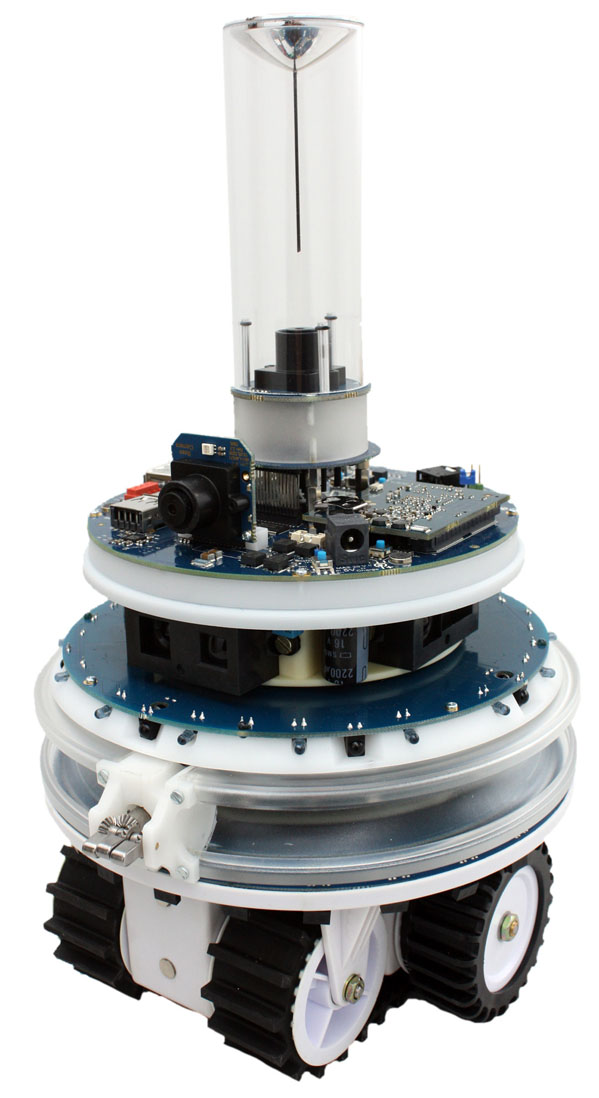
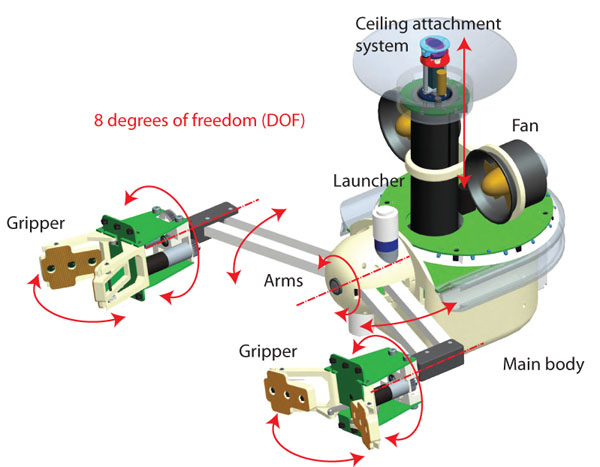
Hand-bot Features:
- Compact size: 38 x 44 x 30 cm
- Vertical mobility using a rope launched by the robot to magnetically
attach to the ceiling.
- Two grippers for aid to the mobility and object manipulation.
- Otherwise the technology (processors, camera, most sensors) is shared
with foot-bots and eye-bots.
Interaction between real foot-bots and one hand-bot:
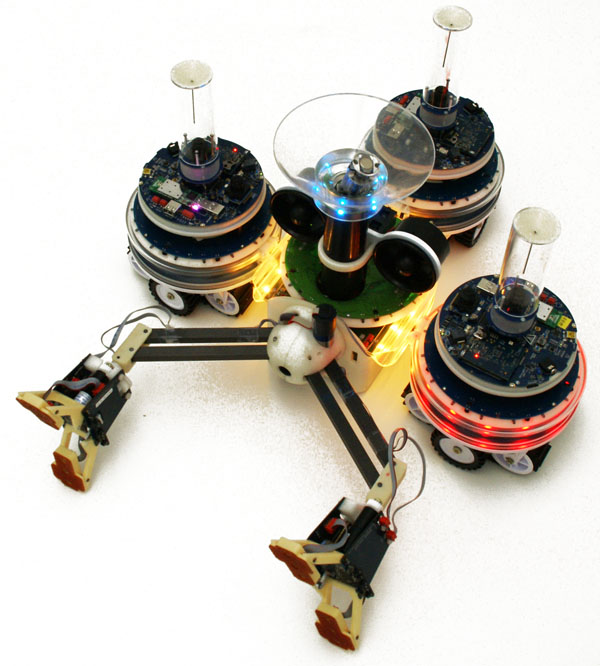
The rope launcher is now functional:
The handbot can now climb a shelf and take a book:
Finally the hand-bot is able to retrive automatically its attachment system:
Eye-bots
The eye-bot has 8 rotors, arranged in a coaxial quadrotor configuration,
that provide the main lifting force and control. The co-axial arrangement allows for a
smaller size and increased payload capability.
Eye-bot Features:
- Robust and light weight body, 50 cm in diameter
- Jigsaw-like carbon-fiber airframe assembly
- Eight powerful and efficient brushless motors
- Endurance of 10-20min
- Simple collision protection system for indoors
- Ceiling attachment device (extend mission endurance, acquire birds eye view of environment & stabilise camera system)
- IMX.31 CPU, same as the foot-bot and hand-bot
- Designed or swarm operation ad coordination

Sensing Abilities:
- Custom 360° pan-tilt camera system, equipped with 3MP camera
- Optical 360° infrared environment distance scanner
- Advanced 3D relative positioning sensor for swarm coordination/communication
- Custom 6-Degree of freedom inertial sensing
- Sonar and differential pressure sensors for altitude determination
- Magnetometer for heading determination
- Horizontal RGB led rings (local visual communication)