Computer simulation is a fundamental tool to aid the development and study
of robotic systems. Existing simulation packages for multi-robot systems do not
provide the flexibility, scalability, and computational efficiency necessary to
deal with the challenges posed by the Swarmanoid project. Therefore, we have
designed and implemented the ARGoS, a novel continuous-time simulator for general multi-robot
simulation that includes full support for the simulation of the three different
types of robots-- eye-bots, hand-bots and foot-bots--composing the swarmanoid.
The simulator has been designed to provide the following core properties and
functionalities to the user:
- Modeling of all the components of the swarmanoid and of the environment
according to multiple, selectable, levels of physical detail.
- Computational efficiency, to allow running simulations of complex indoor
real-world scenarios including relatively large numbers of robots, and to
ease the use of computationally-demanding algorithms for learning and
control.
- Effective monitoring and visualization of the activities and performance
of the single robots and of the entire swarmanoid.
- Transparent migration of robot control code from the simulator to the
real robots.
- High modularity, to facilitate reuse and integration of available
software modules, permit independent code development from different
contributors, and ease both the static and dynamic addition and removal of
components and functionalities such as sensors, actuators, controllers,
physics engines, and visualization modalities.
General characteristics
ARGoS is a discrete-time simulator for multi-robot systems acting in 3D
spaces. The main code is entirely written in C++ and is all based on the use of
free software libraries.
Each robot, and, more generally, each entity active in the 3D space, is a seen
as composition of a physical structure, a set of sensors and actuators, and
a controller module. The simulator includes an extensive set of sensors
and actuators, and in particular all those necessary to allow the realistic
simulation of the three types of robots composing the swarmanoid.
The simulator also includes multiple physics engines, that allow dealing
with the simulation of the physics of movements and collisions according to
different levels of realism and computational effort. During the same
simulation run the physics of different groups of robots can be handled by
different physics engines.
Figure 1 shows the general architectural characteristics of ARGoS concerning the
simulation of a single robot.

Figure 1
The
Swarmanoid Space is the 3D arena where the robots and all the
other simulated entities (e.g., objects such as bookshelves and tables, or
active entities such as light emitters) live and act. It is implemented as a
scene
graph.
Sensor and actuators can be "specific", in the sense that they
depend on the specific characteristics of the physics engine (see discussion
below), or "generic", in the sense that they are independent of the physics
engine and relates only to the general 3D coordinate system of the Swarmanoid
Space.
The Common Interface is an abstraction layer that allows the robot
controller to access the robot on-board devices irrespective of the fact that
the controller is running on a simulated or a real robot. This means that the
same controller code can be transparently compiled for running on a simulated
and on a real platform.
Input description of the scenario and visual output
The
simulation scenario describing all the characteristics of the
environment, of the robots, and of the other entities, is given in input to the
simulator in the form of an
XML file using a quite self-explanatory
syntax. A simple example scenario including two
foot-bots and one physics engine is given in this
XML scenario description file.
The Simulator design includes also multiple levels of textual tracing
of the activities of the robots, as well as graphical visualization
based on the use of popular open source three-dimensional graphical renderers
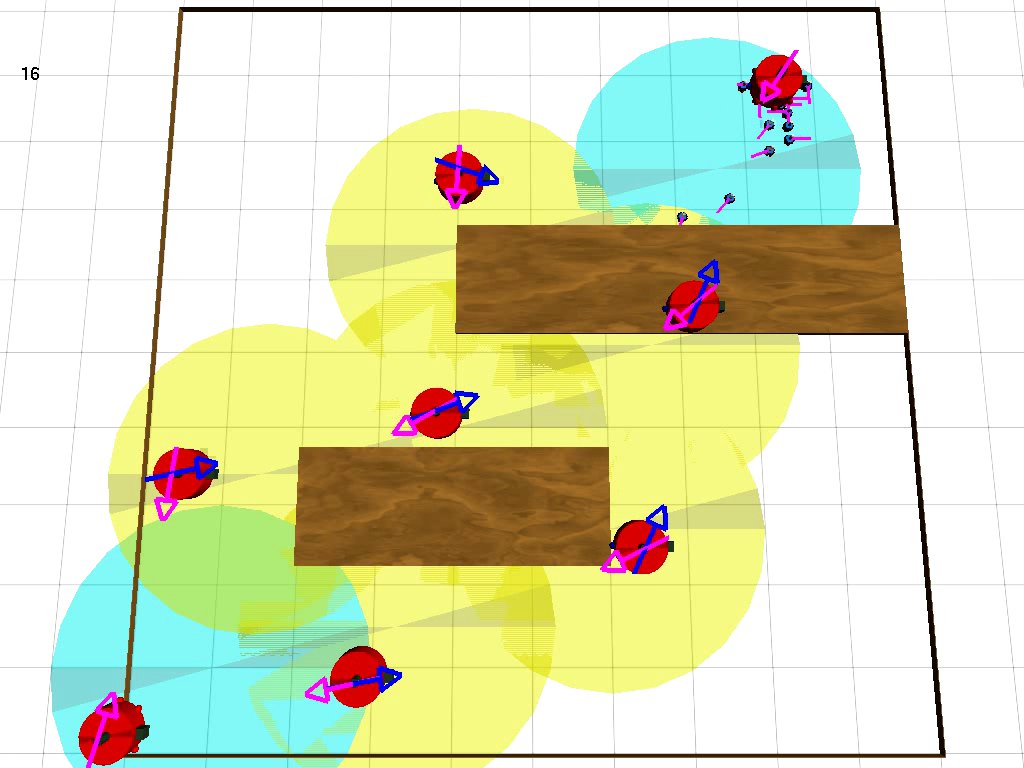
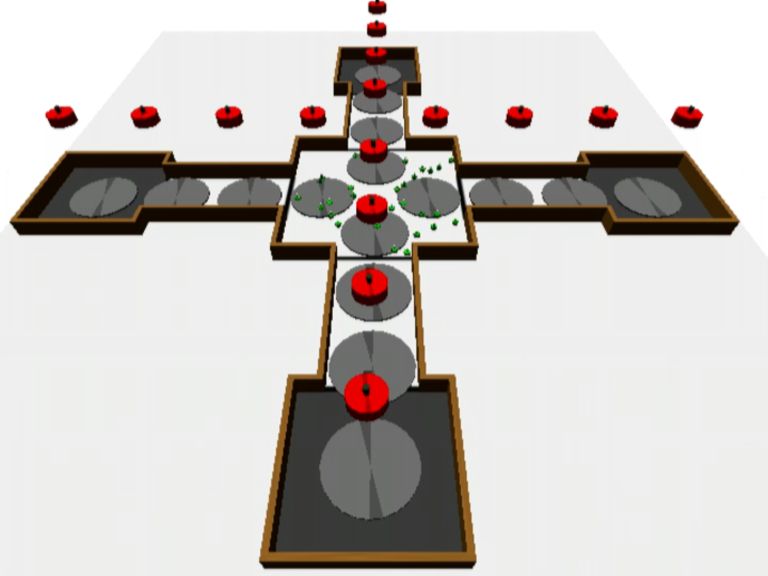
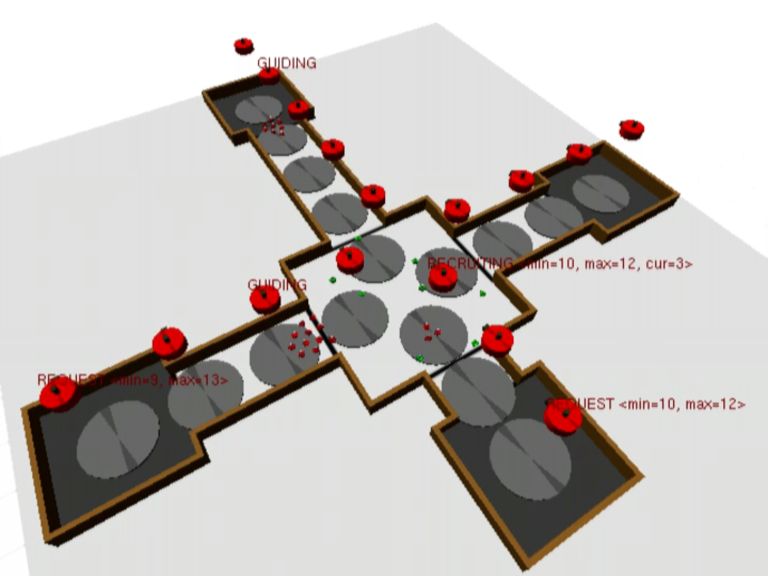
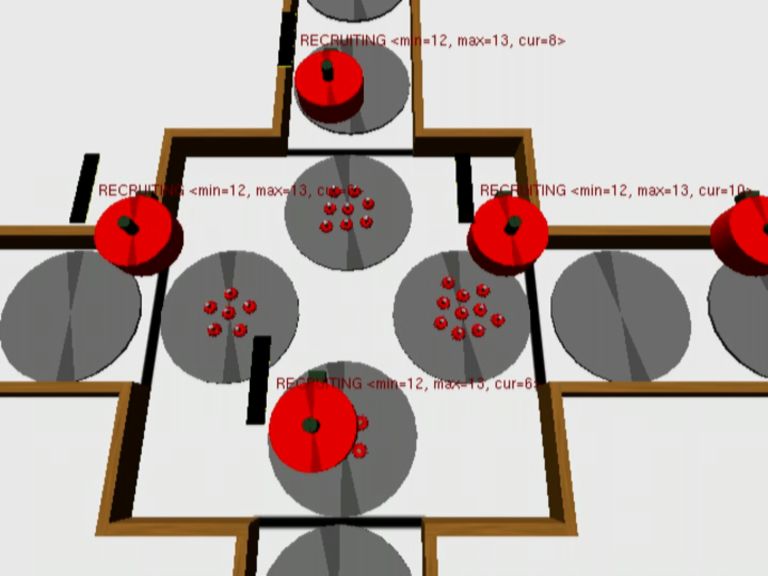
such as 3D OpenGL and Ogre. Figure 2 shows an output frame
using OpenGL of a simulation example where foot-bots and eye-bots are tracking
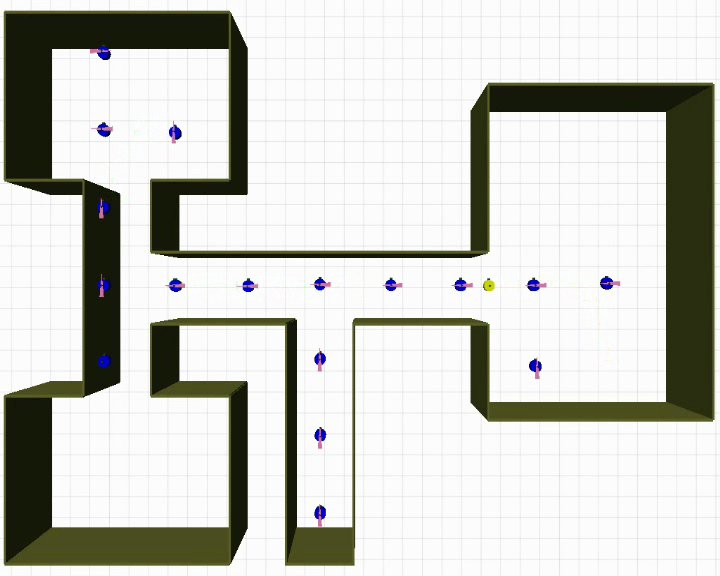
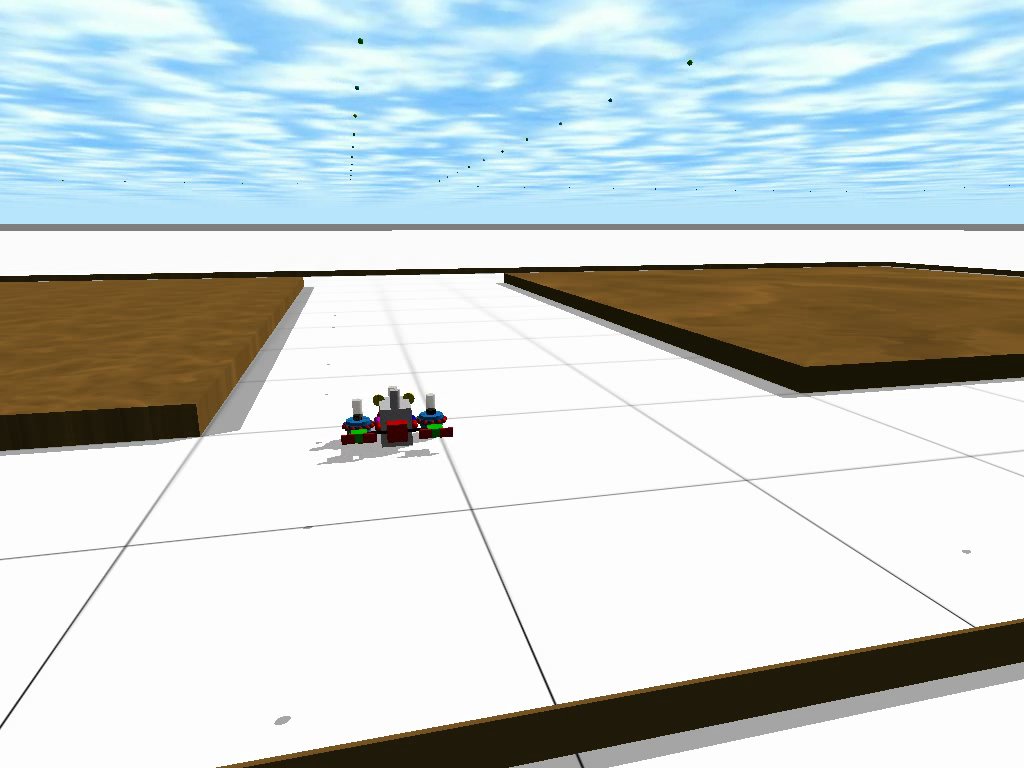
"prey" entities (the text is added just to clarify the different roles). Figure
3 includes two output frames using Ogre showing respectively foot-bots (left)
and hand-bots (right). Clinking on the images it shows they enlarged
version.

Figure 2


Figure 3
Multiple physics engines and their concurrent use
The simulator includes the definition of
multiple physics engines to
handle the calculations of the physical kinematics and dynamics of the robots
and the collisions happening among the physical entities in the simulation
arena.
The presence of multiple physics engines gives to the user the possibility to
model the different robots and their physical interaction according to the
desired level of physical precision and, accordingly, of allocated
computational resources. A simulation run can include the concurrent use of
one or more physics engines, with each engine devoted to model with the desired
level of detail the Newtonian physics for the objects falling within a specific
subspace of the 3D Swarmanoid Space. Each subspace managed by each different
physics engine can be a 1D, 2D, or 3D subspace (our 3D physics engines are
based on the use of the ODE libraries, while the other engines are based on custom implementations). In practice, each
engine independently lets the robots assigned to it acting in a local
coordinate system specific to the engine subspace. A geometrical transformation
maps the local coordinates into the reference ones of the common Swarmanoid
Space. In this way, each robot, even if for instance is physically simulated as
living in a 2D subspace, has anyway access to the full 3D representation of the
arena to consistently communicate with and sense the other robots and
entities.
These characteristics are unique features of ARGoS. From one hand, the
presence of multiple physics engines, provides a to the user a range of
selectable levels of physical precision. From the other hand, the fact that
multiple physics engines can run concurrently taking care of different parts of
the simulation allows to optimize the usage of computational resources,
allocating more resource (i.e., precision) only where it is more
necessary.
For instance, if the focus of an experiments is on eye-bots' behavior, and the
foot-bots are supposed to be rather passive, then, physics calculations on the
entire ground level and for all the foot-bots on it can be dealt with
considering a simplified 2D representation. All the physical interactions on the
ground can be managed by a simple physics engine based on a 2D geometry that
considers only the simulation of the kinematics and not of the dynamics of the
foot-bots.
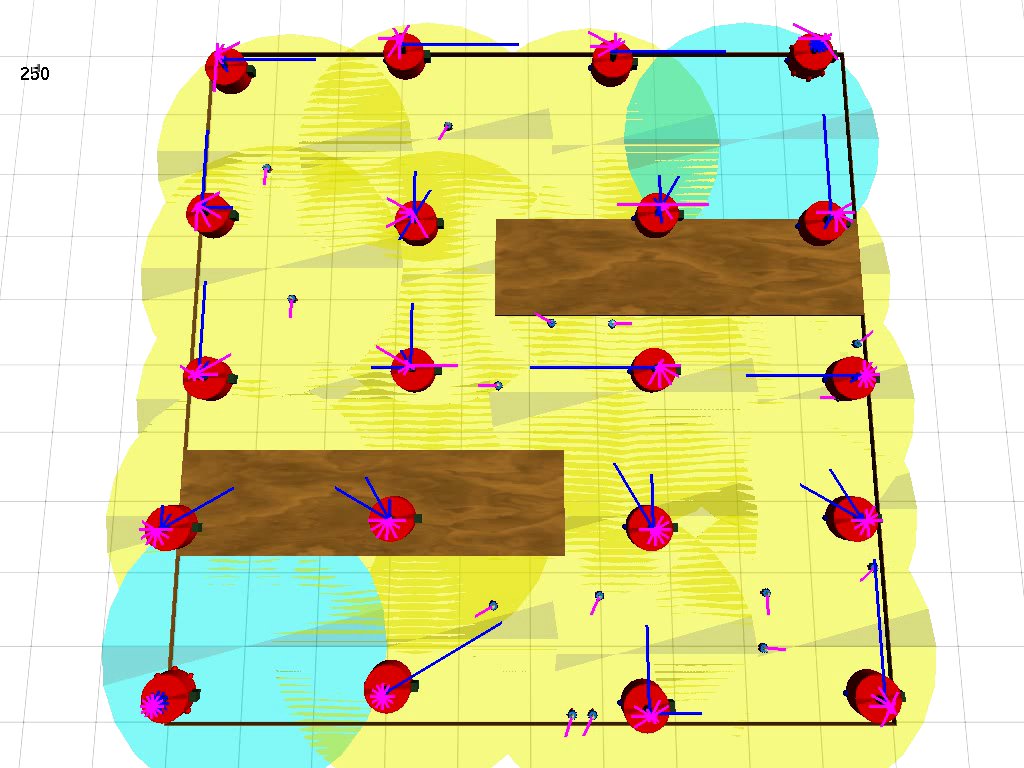
Figure 4 shows a sort of extreme situation where the simulation in the 3D
Swarmanoid Space is actually managed by three different physics engines
working on different 2D orthogonal subspaces. In this case, in which precision
is definitely sacrificed for sake of computational optimization, the foot-bots
are approximated as 2D entities on the ground, the eye-bots are approximated as
2D entities moving on a horizontal plane located at a certain height from the
ground, and the hand-bots are approximated as 2D entities acting on the wall.

Figure 4
Sensors and actuators
The simulator provides a number of sensors and actuators that can be attached
to a controller to produce a realistic of simulation of a foot-bot, eye-bot, or
hand-bot, or to create any new virtual entity to be used during the
simulation.
Each sensor or actuator is either "specific" for the characteristics of a
physics engines (e.g., a camera sensor to be used inside a 2D physics engine
implements a camera returning a mono-dimensional array of pixels, while a
camera sensor for a 3D subspace returns a 2D pixel array), or "generic", if it
is always related to the global 3D structure of the Swarmanoid Space.
In both cases, the controllers access sensors and actuators trough the Common
Interface abstraction layer that makes transparent to the controller the fact
that it is acting on a simulated or on a real robots. This important feature
makes it possible to directly port on the real robots the controller code
debugged and tested in simulation.
A list (incomplete) of the main sensors and actuators currently implemented
and/or already scheduled for implementations is the following:
- wheel actuator,
- IR proximity sensor,
- gripper actuator,
- joint encoder,
- force-torque sensor,
- light sensor,
- IR range and bearing sensor,
- microphone and sound detector,
- inclinometer,
- omni-directional camera,
- linear camera,
- wi-fi transmitter and receiver,
- laser beam actuator
- rotor blades actuator
- ...